처음 3D 스캔을 검토하시는 분도, 발주를 앞둔 분도, 기술 자체에
관심이 있으신 분도 이 페이지 하나로 충분합니다.
2009년부터 100여 건의 스캔·역설계 프로젝트에서 누적된 경험과
노하우를 그대로 정리했습니다.
±1mm
Accuracy
50B+
Total Points
100+
Projects
What Is 3D Scanning
현장을 밀리미터 단위로 디지털 데이터로 바꾸는 기술
3D 레이저 스캐너는 초당 수십만 개의 레이저 광선을 쏘아 대상물의
표면 거리를 측정하는 장비입니다. 측정된 점들이 모여
포인트클라우드(Point Cloud)라는 3차원
데이터를 만듭니다.
건물 한 채를 360°로 둘러싼 수억 개의 점이 그 자체로 정밀
도면이자, 영원히 보존 가능한 디지털 사본이 됩니다. 우리가 익숙한
평면도·단면도·3D 모델은 모두 이 포인트클라우드에서 추출됩니다.
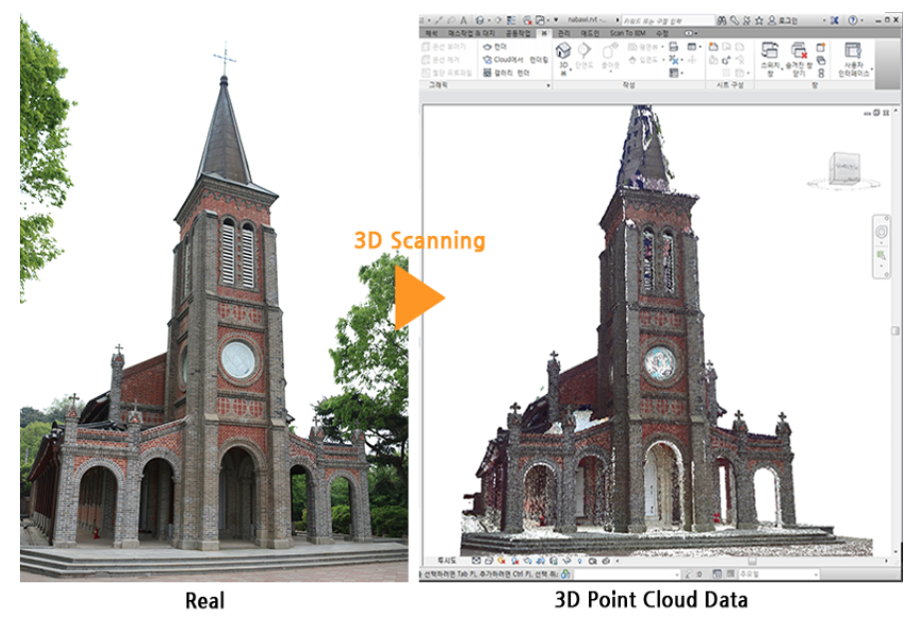
실제 스캔 데이터 — 나바위성당 기록화사업 사례
Equipment
사용 장비
건축·문화재·플랜트 등 분야에 따라 적합한 장비가 다릅니다.
정확도가 중요한 실내 공간은
고정밀 위상차 방식 스캐너를, 광범위한 외부
공간은 장거리 TOF 방식을 사용합니다.
Faro Focus 시리즈Phase-shift Laser Scanner · 대표 기종 S150
점간 정확도
±1mm
최대 측정 거리
150m
측정 속도
976,000 pts/sec
컬러 매핑
HDR 지원
PART 02How It Works
How It Works · 01
스캐너는 어떻게 거리를 측정하는가
스캐너 내부에는 레이저 발진부와
카메라가 직각으로 배치되어 있고, 그 가운데
45도 미러(거울)가 회전합니다. 발사된 레이저가
미러에 부딪혀 90도 굴절되어 외부 사물에 닿고, 다시 돌아오는
시간 차이로 거리를 계산합니다 — MRI 단층 촬영의 원리와
동일합니다.
1초 100만 포인트, 180도 회전이면 충분
미러가 수직으로 빠르게 회전하며 상하 단면을 긁어내고, 본체는
수평으로 천천히 회전합니다. 미러가 이미 위·아래를 모두
커버하므로 본체는 360도가 아니라
180도만 돌면 전 공간이 스캔됩니다.
600,000,000
1초 100만 포인트 × 10분 = 6억 개의
포인트 클라우드 데이터가 한 번의 스캔으로 축적됩니다.
사각지대 — 삼각대 바로 아래
레이저 특성상 장비 바로 하단(45~60도 이내)은 측정이 불가능한
구조적 사각지대로 남습니다. 이 사각지대를 역으로 이용해 작업자가
몸을 숨기는 회피 동선을 짭니다 — 자세한 내용은 아래
현장 노하우 섹션에서.
How It Works · 02
해상도와 시간의 타협
스캔 설정의 핵심은 해상도(점 밀도) ↔ 소요 시간
사이의 타협입니다. 무조건 높은 화질이 답이 아닙니다.
현장의 스케일·피사체 디테일·할당된 시간을 종합적으로 고려해
가장 효율적인 세팅을 찾는 것이 실무의 핵심.
최저 사양
권장
최고 사양
1회 스캔 시간
약 30초
1분 34초
1시간 55분
포인트 수
약 70만
약 1.5M
6억 9,900만
10m 점 간격
50mm
15mm
극세
1m 점 간격
5mm
1.5mm
극세
얇은 파이프나 5cm 미만 디테일은 점 간격이 너무 벌어지면 레이저가
통과해버려 데이터에서 누락됩니다. 권장 설정에서는 10m 거리에서도
15mm 간격, 1m 거리에서는 1.5mm 간격으로 정밀하게 기록되어
실무에서 가장 효율적인 결과물이 나옵니다.
컬러 스캔의 작동 원리
컬러 옵션을 켜면 장비가 두 바퀴 돕니다.
1회차는 레이저로 점 데이터,
2회차는 카메라로 RGB 사진. 두 데이터를 정합해
점 하나하나에 색을 입힙니다 — 인상파 점묘법처럼 점들이 모여
실제 건물의 색상까지 완벽히 구현됩니다. 시간 2배, 비용도 약 2배.
컬러가 불필요한 작업이라면 흑백으로 효율을 높입니다.
How It Works · 03
현장에서의 노하우
장비의 스펙만으로는 좋은 데이터가 나오지 않습니다. 16년간
축적된 현장 경험에서 추출한 핵심 노하우.
🎯정합(Stitching)의 원칙
인접한 스캔 위치들이 시야 교집합을 가져야 소프트웨어가
이어붙일 수 있음. 띄엄띄엄 스캔하면 무용지물.
📐전략적 위치 선정
일렬 기둥 정면이 아니라 사선·교차점에 스캐너를 두어야 뒤쪽
공간까지 데이터에 담김.
📏삼각대 높이 조절
스캐너는 "그 자리에 서서 고개 돌리는 사람". 일반 실내는 공간
중간 높이. 야외는 최대한 높게. 천장 배관은 오히려 낮게.
🚫진동 통제
사다리·스카이 위 스캔 금지. 미세 진동만으로 ±1mm 정확도가
깨짐. 높이가 필요하면 스캐너 전용 리프트만 사용.
⚠️레이저 안전거리
2.7m 이내에서 레이저 직시 금지. 시력 손상 위험. 작업 중
안전 지대 확보 필수.
🌀작업자 회피 동선
스캐너 회전 속도에 맞춰 작업자가 같이 돌면 데이터에 안 잡힘.
단 발로 삼각대를 차면 모든 데이터 무용.
즉석 프리뷰 검수
180도 회전을 마치면 기기 화면에 360° 파노라마 VR 뷰 형태의
프리뷰가 즉시 나타납니다. 작업자는 그 자리에서 사각지대·누락
여부를 검수하고, 이상이 없으면 다음 위치로 이동. 이 과정을
반복해 전 공간을 정합해 나갑니다.
PART 03Process · Deliverables · Use
Process
의뢰부터 납품까지
5단계로 진행됩니다. 각 단계별 클라이언트가 받게 되는 것을 함께 표기.
01
PRE-CONSULTATION사전 협의 및 자료 검토
최초 의뢰 단계에서 가능한 한 많은
정보를 주시는 것이 정확한 견적의 핵심입니다.
자료가 충분하면 첫 통화·메일 단계에서 개략 견적을 즉시
안내드립니다.
✓ 견적을 위해 필요한 자료
✓
현장 주소 — 가장 중요. 지도·스트리트뷰·항공사진으로 외형 사전 확인 가능
✓
개략 면적 및 평면도 또는 건물상태 세부묘사
✓
현장 사진 — 외부, 내부, 천장, 특이 부분
✓
영상 (있으시면)
✓
스캔 목적 — 리모델링 / 기록화 / 유지보수 / 안전진단 등
✓
희망 결과물 — 포인트클라우드만? 도면? BIM 모델?
✓
희망 일정
02
SCAN PLANNING스캐닝 계획 수립 — 변수 사전 점검
3D 스캔은 환경 변수가 매우 많은 작업입니다. 16년간의 현장
경험에서 추출한 핵심 점검 항목을 사전에 모두 검토합니다.
🌡기온·기후
영하 20도, 영상 40도 환경에서는 장비 보호와 정합 정확도 모두 영향. 사전 일정 협의 필수.
인근 철도·공사장 진동, 스카이 작업, 물 위 데크 위 작업은 ±1mm 정확도를 깨뜨림. 한강 유람선 스캔 시 정박된 배 반대쪽 작업이 불가했던 사례, 열차 통과 시 측량이 깨진 사례 — 모두 사전 변수 점검의 결과.
03
SCANNING현장 스캔 작업
현장 준비·기준점 설치·실제 스캔 수행을 한 흐름으로 진행합니다.
계획된 동선에 따라 스캔 위치별로 180° 회전 스캔. 덕트·트레이
등 높은 위치는 특수 삼각대를, 광범위 스캔의 경우 GPS 측량으로
실 좌표 기준을 잡습니다. 일반 건축물은 1일, 대형 단지·플랜트는
1주에서 수개월 이상 소요됩니다.
각 위치에서 취득한 스캔 데이터를 단일 좌표계로 정합합니다.
정합의 핵심은 인접 스캔 사이의 시야 교집합 — 멀리 떨어진 두
공간 사이 정합 기준이 없으면 이어붙일 수 없습니다. 노이즈와
유동 인원·기물을 제거해 깨끗한 포인트클라우드를 만듭니다. 수백개 이상의 다수 스테이션 측량 시 데이터 누적에 따른 정합 오차가 발생할 수 있습니다.
05
REVERSE ENGINEERING역설계 · 도면화 · BIM 모델
정합된 포인트클라우드를 기반으로 Revit BIM 모델을 재구축하고,
평면·단면·입면 도면을 출력합니다. 곡면·비정형 부분은 메쉬
모델링으로 형상 그대로를 보존합니다. 발주처 요구에 따라 360°
VR 아카이브도 함께 납품 가능합니다.